KAERI 이슈
원자력硏, 세계 최초 로봇·센서 활용
방사성핵종 분리 장치 개발

방사성핵종 분리 시스템인 ‘오픈프랩: 센서 이벤트로 작동하는 개방 칼럼 크로마토그래피 시스템’ 개발에 참여한 연구진
(왼쪽부터) 방사성폐기물핵종분석실 오심온 선임연구기술원, 선진핵주기기술개발부 이종광 책임연구원, 방사성폐기물핵종분석실 유정보 책임연구원
방사성폐기물 관리에서 안전한 처분과 부피 감용은 매우 중요한 과제다. 이를 효과적으로 수행하기 위해서는 방사성핵종 분석이 필수적인데, 분석 과정은 크게 전처리, 분리, 계측으로 나뉜다. 최근 우리 연구진이 이중 ‘분리’ 과정에 대해 신개념 장치를 개발했다.
선진핵주기기술개발부 이종광 박사팀은 12월 3일, 세계 최초로 로봇과 센서를 활용한 핵종 분리 장치를 개발했다고 밝혔다. 핵종 분리는 방사성폐기물을 녹인 시료에 특정 핵종과 반응하는 시약을 투입해 이루어지는데, 중력으로 분리 용기에 시약을 투입하는 수동 방식과 펌프를 활용한 자동 방식이 있다. 수동 방식은 시약의 투입 속도를 조절할 수 없고, 자동 방식은 펌프와 밸브, 튜브 등 복잡한 구성요소를 사용하며 사전에 정한 시간에 따라 밸브를 조절해야 하는 단점이 있다. 자동 방식은 특히 시약 투입을 조절하는 밸브와, 시약이 이동하는 튜브에 방사성 시료가 남을 수 있어 매번 세척해야 했다.
연구팀이 새로 개발한 분리 장치는 자동 방식을 사용하되 로봇을 이용해 방사성 시료와 접촉하지 않고 시약을 투입한다. 로봇 덕분에 시료가 잔류하거나 막힐 우려가 있는 밸브를 제거하고, 튜브 사용량을 획기적으로 줄였다. 이에 방사성 시료와 접촉하는 구성품을 손쉽게 교체할 수 있어 시료 잔류로 인한 교차오염 가능성을 원천 차단할 수 있다.
연구원은 로봇과 센서를 활용해 신개념 방사성핵종 분리 장치를 개발하고 핵종 분리 실험에 성공했다.
또한, 핵종 분리 용기에 비접촉 센서를 최초로 적용하여 시약 투입 완료를 감지하고, 분리 용기 내부의 흡착제에 핵종이 흡착되거나 분리되는 과정이 끝나는 것을 실시간으로 알려준다. 기존의 방식에서는 설정된 시간 동안 펌프를 작동시키는 방식으로 분리가 이루어졌으나, 센서를 활용한 새로운 방식은 더욱 정확하고 효율적인 분리를 가능하게 했다.
특히 이 장치는 하나의 시료에서 테크네튬(99Tc), 스트론튬(90Sr), 철(55Fe), 나이오븀(94Nb), 니켈(59,63Ni)을 순차적으로 분리하는 공정을 효율적으로 진행할 수 있다. 연구원 방사성폐기물화학분석센터와 협력해 수행한 유효성 평가에서 Tc, Sr, Nb, Ni은 기존 방식보다 3배 빠른 속도를 보이면서도 83~97 %에 달하는 높은 핵종 회수율을 달성했다. 또한, Fe는 정확한 시약 양과 속도 조절을 통해 약 33 % 더 오래 반응시킬 수 있어 정밀도가 높아졌다.
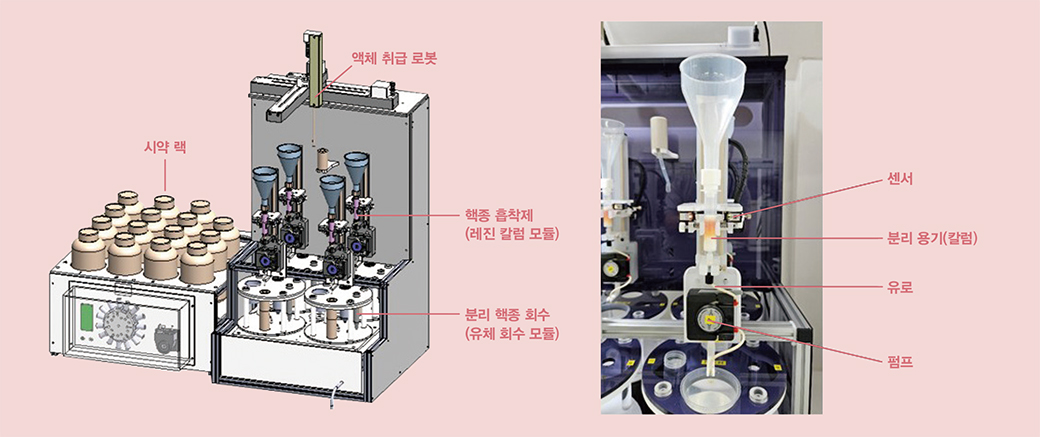
로봇·센서 적용 핵종 분리 장치 구성 모습
이번 성과는 분석 화학 분야 저명 학술지인 애널리티컬 케미스트리(Analytical Chemistry)에 ‘오픈프랩: 센서 이벤트로 작동하는 개방 칼럼 크로마토그래피 시스템(OpenPrep: sensor event-driven open column chromatographic sample preparation system)’이라는 논문명으로 11월 11일 온라인 게재됐으며, 관련 기술에 대한 특허도 다수 등록됐다.
류재수 선진핵주기기술개발부장은 “향후 기술 상용화를 통해 원자력 시설의 운영이나 해체 시 발생하는 방사성폐기물을 더욱 신속하고 효율적으로 분석할 수 있는 기술적 돌파구가 마련될 것”이라고 강조했다.